高阶智驾迎来历史性拐点——政策破冰、市场下探与“VLA+世界模型”的技术革命
仅代表个人观点 |声明
AI生成 | 配图来源


2026年,注定是智能网联汽车(ICV)与智慧交通发展史上的一个关键分水岭。过去几年是智驾技术的“高端尝鲜期”与“规则摸索期”,最近行业正在经历一场从底层技术范式到顶层政策法规的全面重塑。
根据目前智能驾驶发展现状,可以看出:智驾政策正加速完善,城市NOA进入规模化渗透新周期,而底层算法则在端到端的基础上,衍生出VLA(视觉-语言-动作)与世界模型(World Model)的高度融合统一。
我们可以从政策法规、市场格局、核心算法演进与产业生态四个维度,并结合交通数字化的宏观视角,探寻2026年智驾产业的演进脉络。
一、 政策风向标:从地方试点到国家强制标准,L2/L3“有法可依”
智能驾驶的下半场,安全与法规是第一基石。随着感知与控制权逐渐向系统转移,国家层面的强制性标准正在以前所未有的速度落地。
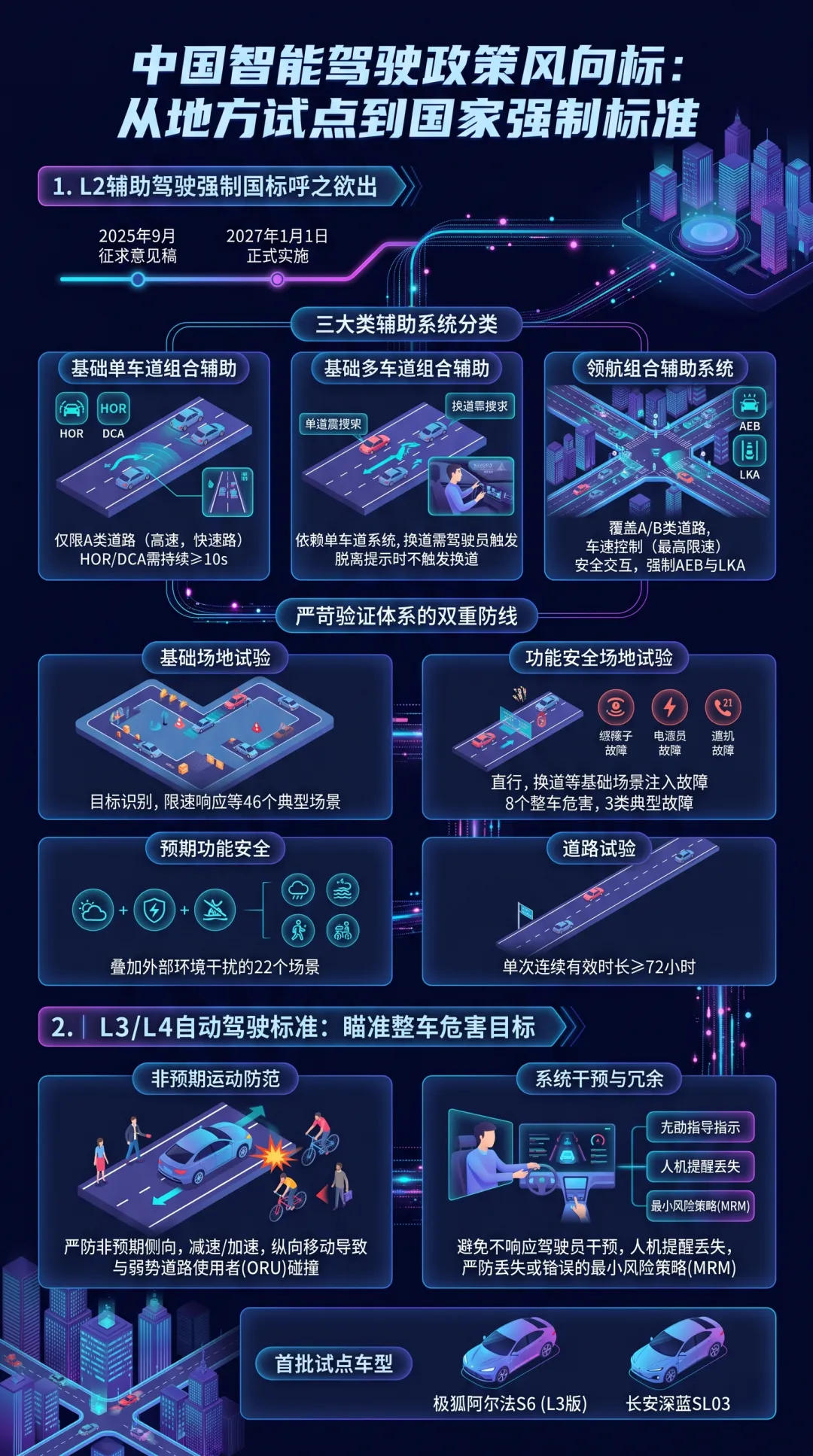
1. L2辅助驾驶“强制国标”呼之欲出
过去,L2级辅助驾驶的宣传往往存在灰度空间,而现在统一定义的标尺已经划定。2025年9月,工信部发布了《智能网联汽车组合驾驶辅助系统安全要求》强制性国标征求意见稿,并计划于2027年1月1日正式实施。该标准与国际UN R171法规接轨,结合中国复杂交通场景,将辅助系统精准划分为三大类(泊车除外) :
-
基础单车道组合辅助: 仅限A类道路(高速、快速路),要求升级的HOR/DCA需持续≥10s。 -
基础多车道组合辅助: 依赖单车道系统,换道需驾驶员触发,且在脱离提示时不触发换道。 -
领航组合辅助系统: 覆盖A/B类道路,具备车速控制(最高限速限制)、安全交互(适应交通流,不无故急刹/急转向),且强制要求配备AEB与LKA系统。
在验证体系上,构建了严苛的双重防线:
-
基础场地试验: 包含目标识别、限速响应等46个典型场景。 -
功能安全场地试验: 针对直行、换道等基础场景注入故障,涵盖8个整车危害、3类典型故障(供电、传感器、通信)。 -
预期功能安全: 叠加外部环境干扰的22个场景。 -
道路试验: 要求单次连续试验累计有效时长至少72小时。
2. L3/L4自动驾驶标准:瞄准整车危害目标
2026年2月,首部针对L3级和L4级自动驾驶系统的强制性国家标准征求意见稿正式发布 。它对L3级ADS相关的危害功能安全目标作出了极其细致的约束,例如:
-
非预期运动防范: 严防非预期侧向运动、非预期减速/加速、从静止位置的非预期纵向移动导致与弱势道路使用者(ORU)碰撞。 -
系统干预与冗余: 必须避免功能异常导致不响应驾驶员干预,或人机提醒丢失;严防丢失或错误的最小风险策略(MRM)。
在此标准指引下,极狐阿尔法S6(L3版)、长安深蓝SL03等首批L3级有条件智驾车型已在北上深渝等地开展上路试点 。
二、 市场普及期:城市NOA打破“高价壁垒”,全面进入下沉市场
技术平权正在深刻改变乘用车市场的竞争格局。城市NOA处理复杂非结构化道路(路口、环岛、无保护左转)的能力,已成为消费者购车的核心决策指标。
1. 渗透率的“狂飙”与消费者的“刚需化”
-
规模化渗透: 2025年1-10月,国内乘用车城市NOA搭载量达到239.2万辆,渗透率达12.8%,同比提升4个百分点。其中,10月单月搭载量冲至34.3万辆,单月渗透率高达16.5% 。 -
价格段分布: 20-30万区间是目前的绝对主力。其中25-30万车型渗透率高达57.0%(搭载量66.4万辆),20-25万车型渗透率也达到了29.7% 。 -
麦肯锡洞察: 《2025麦肯锡中国汽车消费者洞察》指出,对于20-25万价位的消费者,城市NOA已经超越多屏交互、空气悬架等,成为排名第一的“必须项(Must-have)”,61%的用户将其视为标配。
2. 10-20万级市场的“技术内卷”
2025年起,多家车企将城区NOA强力下放至20万甚至15万以下市场,20万以下车型城市NOA搭载量占比已突破10%:
-
比亚迪的“全民智驾”: 发布天神之眼技术矩阵,天神之眼C首批上市21款车型,覆盖7万到20万级。截至2025年底,其辅助驾驶车型保有量已超256万辆。 -
吉利“千里浩瀚”: 覆盖L2-L3级,分为H1至H9五个层级。H5方案支持城市无图NOA,搭载该方案的领克07EM-P上市价格下探至13.98万元。 -
小鹏 MONA M03的“降维打击”: 搭载“图灵AI系统”与双Orin-X芯片(508TOPS算力),Max版本将城市NOA直接打入13万元价格段,实现了算力上4-6倍的同级超越。 -
鸿蒙智行尚界H5: 首次将顶级的华为乾崑智驾ADS 4带到15.98-19.98万元区间,预售期间75%的用户选择了搭载满血智驾的Max版。
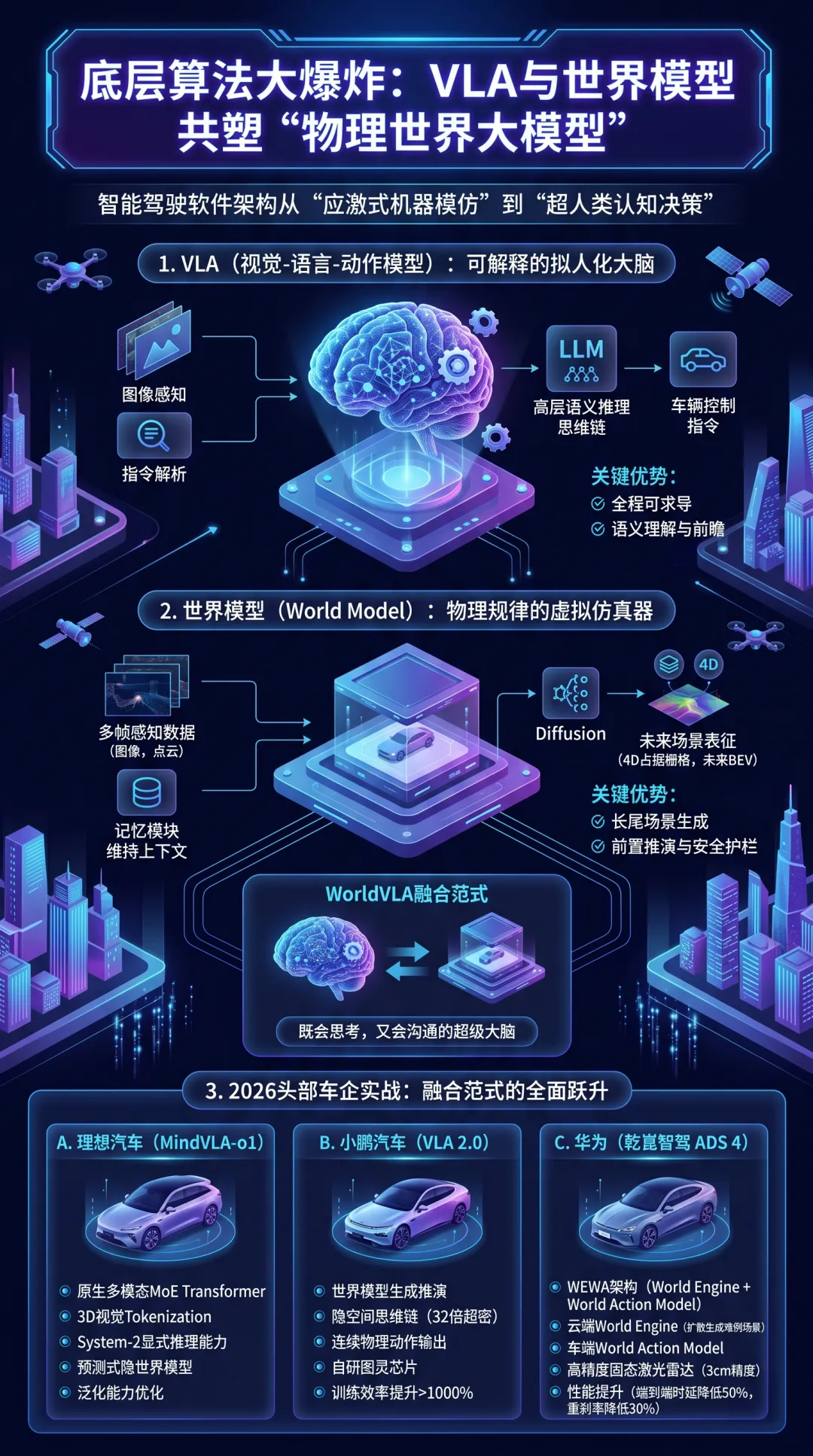
三、 底层算法大爆炸:VLA与世界模型共塑“物理世界大模型”
智能驾驶软件架构正在经历从“应激式机器模仿”到“超人类认知决策”的范式革命。
过去的智驾经历了“模块化(感知-决策-控制)”和“初级端到端(分段式E2E)”阶段,但传统的端到端模型本质是黑箱模仿学习,面临着长尾数据极难获取以及缺乏逻辑推理能力的两大天花板。为此,2026年的头部技术路线逐渐收敛于两大底层架构,并开始走向深度融合。
1. VLA(视觉-语言-动作模型):可解释的拟人化大脑
传统VLM(视觉语言模型)有场景理解能力,但无法直接生成控制指令(存在行动鸿沟) 。VLA则实现了真正的融合:
-
工作机制: 将感知、推理与控制一体化。通过视觉编码器处理图像,语言编码器解析指令,大语言模型进行高层语义推理(思维链),最后由动作解码器直接输出车辆控制指令。 -
核心优势: -
全程可求导: 当车辆在现实中犯错(如刹车晚了),错误信号可以从轨迹输出端无碍地反向传播回视觉层,实现自动化数据闭环迭代]。 -
语义理解与前瞻: 能够深刻理解复杂语义,如交警手势、潮汐车道、临时施工等,并在环岛等场景中生成多步规划。
2. 世界模型(World Model):物理规律的虚拟仿真器
VLA是驾驶员的大脑,世界模型是在其脑海中演练未来的“预言家”。
-
工作机制: 基于过去多帧感知数据(图像、点云等),预测未来下一帧或多帧的环境状态变化。它包含输入编码、记忆模块维持上下文,并由生成模块(扩散/自回归)生成未来场景表征(如4D占据栅格、未来BEV)。 -
核心优势: -
长尾场景生成: 可在云端大规模模拟极端、稀有场景,打破对真实路采专家数据的依赖。 -
前置推演与安全护栏: 可以在系统输出动作前,在内部进行短时序推演,作为安全校验机制。
3. 2026头部车企实战:融合范式(WorldVLA)的全面跃升
“VLA+世界模型”的融合,正在塑造“既会思考,又会沟通”的超级驾驶大脑。
-
理想汽车(MindVLA-o1): 2026年3月发布。采用原生多模态MoE Transformer架构 。不仅引入了3D视觉Tokenization直接进行物理空间建模,还加入了System-2显式推理能力。其内置的预测式隐世界模型(Predictive Latent World Model),使得系统能在隐空间中模拟未来,并通过闭环强化学习持续优化泛化能力。 -
小鹏汽车(VLA 2.0): 同样于3月发布,引入世界模型进行生成与推演,创新采用隐空间思维链(Latent COT,32倍超密视觉思维链)代替传统文本语言进行推理,直接输出连续物理动作。配合自研图灵芯片与编译器优化,车端运行效率暴增12倍。云端单GPU训练效率提升超1000%,过去大半年迭代了468版模型。 -
华为(乾崑智驾 ADS 4): 推出革命性的WEWA架构(World Engine + World Action Model)。云端World Engine利用扩散生成模型,生成高达真实世界1000倍密度的难例场景;车端World Action Model配合高精度固态激光雷达(精度达3cm),实现端到端时延降低50%、重刹率降低30%。

四、 产业生态与供应链:自研筑高墙,合作扩版图
伴随底层技术的指数级迭代,国内车企在智驾开发方案上形成了层次分明的三大路线:
-
软硬全栈自研(技术护城河): 以特斯拉、华为、小鹏、理想为代表。通过自研芯片(或深度定制)与算法闭环,实现软硬件极致协同。门槛极高,需要千人级团队与巨额投入,但能够掌握独占数据资产,实现快速OTA 。 -
自研+外采(主流选择,1+1>2): 以吉利、比亚迪、蔚来、长安等为代表。车企自研核心高阶算法掌握主权,中低配车型或特定硬件模块引入第三方供应商。这种模式极大平衡了研发成本与量产效率,开发周期可缩短至2-3年。 -
软硬全栈外采(快速落地): 面向中低端车型或部分合资品牌,由供应商提供成熟方案,0.5-1年即可上车,成本高度可控。
第三方智驾供应商迎来爆发期:高阶智驾向主销车型的下放,为头部供应商带来了史无前例的增量空间。根据2025年1-10月实际上险数据统计,第三方智驾供应商市占率呈现高度集中态势:
-
Momenta(市占率60.2%): 绝对的头部玩家,搭载量达34.8万辆。截至2025年10月,已斩获比亚迪(含方程豹、腾势)、丰田、奥迪、广汽埃安等超160款车型定点。 -
华为HI(市占率20.6%): 搭载量11.9万辆(剔除鸿蒙智行“五界”车型)。深度绑定长安阿维塔、北汽极狐等创新品牌,累计合作定点超100款。 -
其他厂商(元戎启行、卓驭科技等): 合计市占率19.2%。元戎启行重点突破长城魏牌坦克及吉利银河;卓驭科技则拿下宝骏、哈弗等定点。
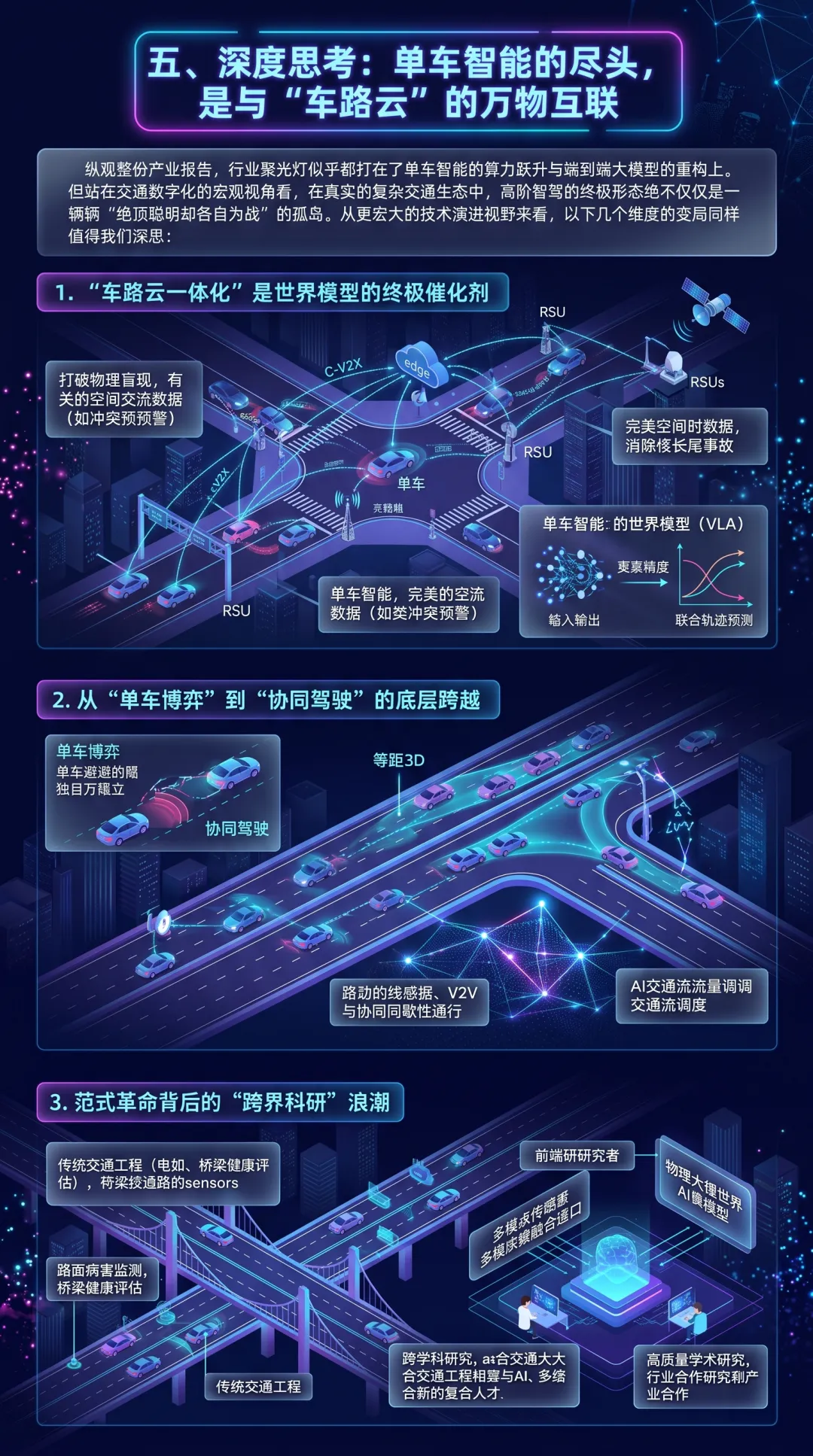
五、 深度思考:单车智能的尽头,是与“车路云”的万物互联
行业的聚光灯似乎都打在了单车智能的算力跃升与端到端大模型的重构上。但站在交通数字化的宏观视角看,在真实的复杂交通生态中,高阶智驾的终极形态绝不仅仅是一辆辆“绝顶聪明却各自为战”的孤岛。
从更宏大的技术演进视野来看,以下几个维度的变局同样值得我们深思:
1. “车路云一体化”是世界模型的终极催化剂。目前探讨的世界模型和VLA,其本质是对物理世界的虚拟重建与未来推演。但这往往受限于单车视距内传感器的物理盲区。 真正的技术飞跃,将发生在单车智能与“车路云一体化”深度协同的时刻。通过C-V2X技术和端云协同,高速公路的数字化基础设施可以为车端提供无死角的“上帝视角”宏观数据。当完美无缺的时空路况数据(如无信号灯交叉路口的冲突预警数据)喂给单车的世界模型时,联合轨迹预测的精度将呈现指数级跃升,这才是突破物理极限、彻底消灭长尾事故的终极路径。
2. 从“单车博弈”到“协同驾驶”的底层跨越。当前的端到端模型,更多是基于单车视角的博弈与避障策略。但在瞬息万变的现实路网中,我们还需要更高维度的协同策略。例如,在高速公路数字化的背景下,通过车联网实现“协同间歇性通行”或纵向间距压缩等高级协作驾驶策略。未来的算法架构,必然会向着融合路侧感知与车间协同(V2V/V2I)的网络模型演进,让AI不仅懂驾驶,更懂交通流调度。
3. 范式革命背后的“跨界科研”浪潮。随着技术路线向物理大模型收敛,行业研究正在发生剧震。过去,我们需要大量编写规则代码的工程师;而现在,行业极其渴求那些既懂传统交通工程(如路面病害监测、桥梁健康评估)、又精通多模态传感器融合与AI大模型的前沿复合型人才。如何在智能网联飞速迭代的当下,持续产出高质量的学术研究并推动产学研落地,是摆在每一位交通科研工作者面前的核心命题。
技术路线的逐渐清晰,意味着产业从混沌的摸索期走向了高速扩张期。2026年,我们将见证“物理世界大模型”赋予汽车真正的认知决策能力,更将迎来车与路、云深度协同的智慧交通新纪元。
❝
互动话题:您认为纯粹的“单车端到端大模型”与“车路云一体化(C-V2X)”,谁才是未来高阶智驾的终极解法?欢迎在评论区留言探讨。
