

外骨骼机器人传感器市场规模分析(50页报告)
或扫码获取更多报告

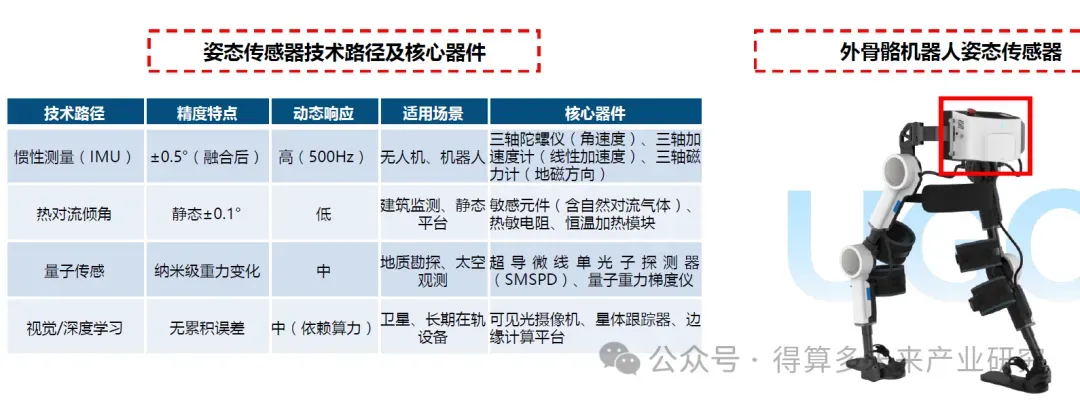
姿态传感器是一种测量物体在三维空间中方向或角位置的设备,通过测量物体的角度、方向和加速度等参数来确定物体的姿态,广泛应用于航空航天、机器人、汽车、消费电子、医疗设备等多个领域。姿态传感器的技术路径多样,根据测量原理、核心器件和应用场景的差异主要可分为惯性测量(IMU)、热对流倾角传感器、量子传感、视觉与深度学习融合等,选型时需综合考量精度需求、动态环境、功耗成本及部署场景等因素,IMU为当前主流。
在外骨骼机器人中,姿态传感器一般位于背部等关键位置(预计1-2个),能够模拟人的平衡和空间定向功能。在行走时,可以检测到微小的姿态变化和振动,从而智能调节助力频率。
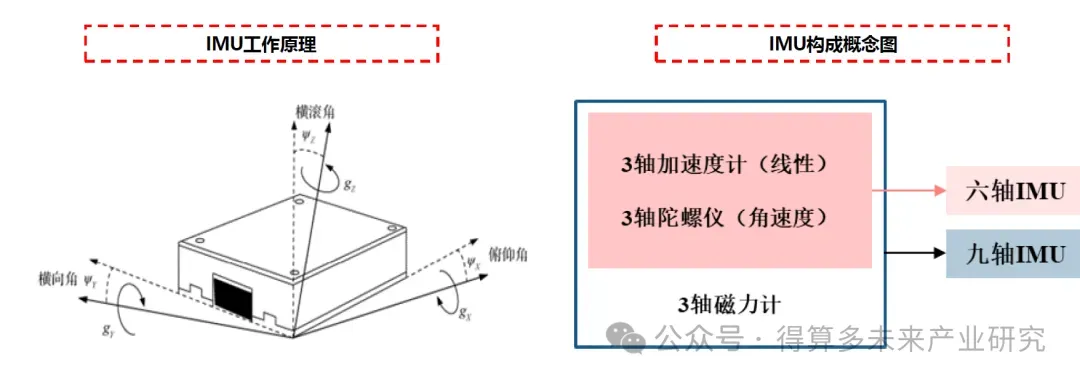
陀螺仪和加速度计通过惯性技术实现物体运动姿态和运动轨迹的感知,是惯性系统的基础核心器件,其性能高低直接决定惯性系统的整体表现。硅基MEMS惯性传感器因小型化、高集成、低成本的优势,成为现代惯性传感器的重要发展方向。MMEMS加速度计利用重力加速度以检测设备的倾斜角度和掉落旋转等操作,但是测量结果会受到运动加速度的影响,使倾角测量不够准确,所以通常需利用MEMS陀螺仪和磁传感器补偿。磁传感器利用地磁场测量方位角时,会受到系统中电流变化及设备倾斜角度的影响,需要用MEMS加速度计和MEMS陀螺仪进行补偿。而MEMS陀螺仪静态时无输出,运动时才输出角速率,因此独立的MEMS陀螺仪无法准确判断设备的姿态,故需要准确确认运动状态的设备通常组合使用三轴加速度计、三轴陀螺仪,以及三轴磁传感器。
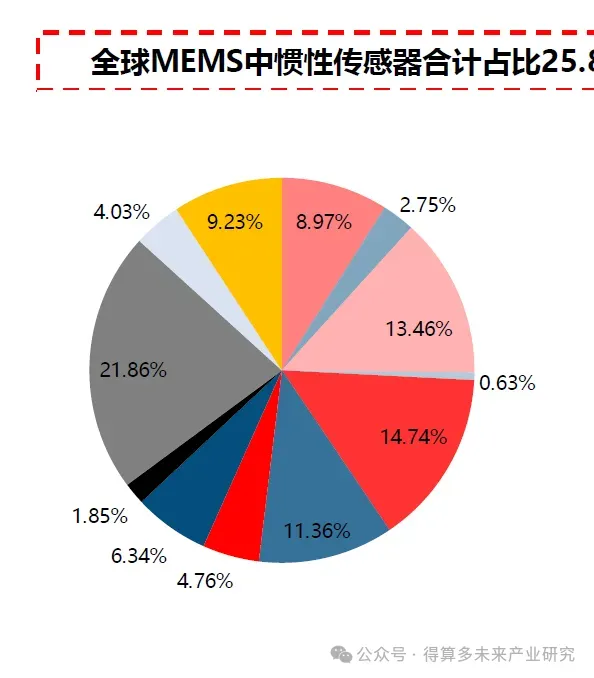
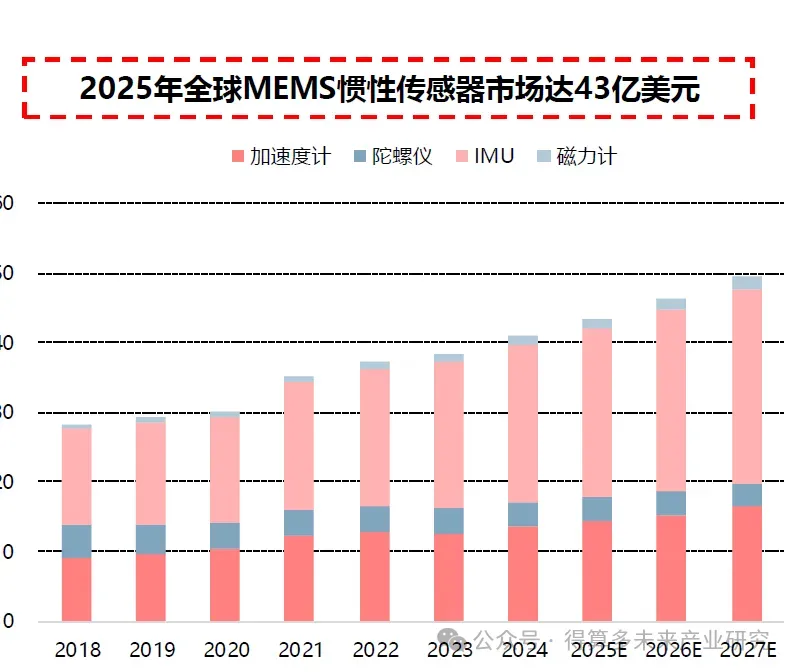
2025年全球MEMS中加速度计、陀螺仪、IMU、磁力计市场规模分别达14.35、3.50、24.14、1.39亿美元,合计规模43.38亿美元(约合人民币316亿元)。随着下游应用对集成化的要求提升,IMU产品的市场空间与应用占比将逐步增大。 在外骨骼机器人销量达1000万台,单台需要1个IMU,单价降至400元的假设下,带来IMU的市场空间约40亿元,有较大的市场弹性。
芯动联科:陀螺仪龙头,向IMU整线延伸,低空、自动驾驶、机器人均有布局。公司主要产品为高性能MEMS惯性传感器,包括MEMS陀螺仪和MEMS加速度计,均包含一颗微机械(MEMS)芯片和一颗专用控制电路(ASIC)芯片。产品性能可比肩国外龙头,广泛应用于国内高端工业、无人系统和高可靠领域,并在低空和自动驾驶领域有积极进展,机器人布局中。 华依科技:惯性导航产品正式进入大规模量产阶段。公司对IMU的前期布局逐步进入收获期,2022年获奇瑞汽车定点,2023年获得智己汽车某项目惯性导航总成和某客户某车型惯性导航定点。2024年,公司与国内多家头部机器人企业展开深度合作,围绕机器人重心姿态控制、运动控制等方向展开算法及硬件研发,目前已得到部分客户订单,实现了人形机器人IMU的小批量供货:
评论