

感知之眼:六轴陀螺仪的技术演进、市场版图与未来图景
在智能硬件与自主系统蓬勃发展的今天,有一类元器件虽不常被用户直接感知,却构成了设备感知物理世界的基石——六轴惯性测量单元。这颗集成了三轴陀螺仪与三轴加速度计的微型芯片,如同设备的“内耳”与“前庭”,在无人驾驶汽车穿越隧道、人形机器人完成空翻、工业机械臂抓取精密零件时,默默地执行着姿态解算与运动追踪的任务。
技术内核:从物理量测到智能感知
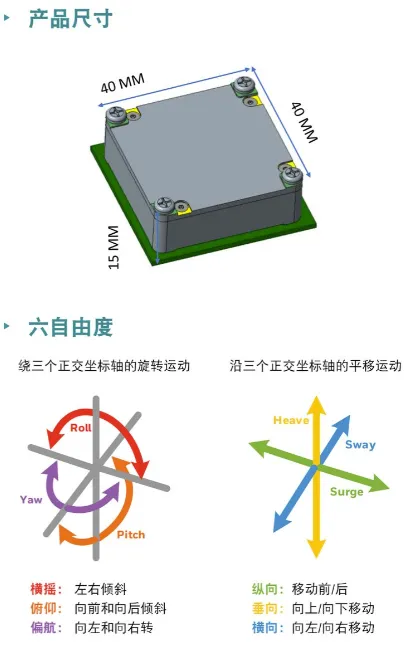
六轴IMU的本质,是牛顿力学定律在微米尺度上的精妙实现。其中,陀螺仪依据科里奥利效应测量角速度,加速度计则检测线加速度。两者通过MEMS工艺被集成在单一硅片上,配合ASIC芯片完成信号处理,最终输出可被主控芯片理解的六自由度数据。

衡量IMU性能的核心指标是零偏稳定性——即无输入时输出值的离散程度,它直接决定了传感器能在多长时间内保持有效精度。根据这一指标,IMU被划分为消费级、战术级、导航级和战略级四个梯度。消费级产品零偏稳定性在10°/h以上,仅能满足手机手势识别等简单需求;而导航级产品可达0.01-0.1°/h,足以支撑飞机的中等时长导航任务。
应用版图:从军工高精尖到民用多元化
过去,高精度IMU主要服务于国防与航空航天领域,一枚导航级陀螺仪的成本可达数万美元,令民用领域望而却步。但随着MEMS技术持续突破,IMU正以前所未有的速度渗透进各类民用场景。
智能驾驶是IMU增长最确定的市场之一。以IMU为核心的惯性导航系统,是L3级以上自动驾驶的刚需模块。当车辆进入隧道、地库或遭受信号干扰时,GNSS信号会瞬间失效,此时IMU凭借其“不依赖外部信号”的特性,成为唯一能实时输出完备六自由度数据的设备,为车辆提供不间断的定位能力。
人形机器人则代表了IMU应用的技术高地。机器人要实现动态平衡、步态控制乃至空翻等高难度动作,必须依赖IMU提供毫秒级的姿态反馈。目前行业正就采用六轴IMU还是九轴AHRS展开技术辩论——前者成本更低、延迟更小,但航向角会随时间漂移;后者虽通过磁力计解决了漂移问题,却要面对电机与金属结构带来的磁场干扰挑战。这场技术路线的博弈,正在推动传感器融合算法不断精进。
工业与物联网领域同样蕴藏巨大需求。工程机械的姿态监测、风电塔筒的振动检测、测绘测量设备的精准定位,都离不开IMU的支撑。尤其值得注意的是,六轴IMU与3D打印技术正在形成双向赋能的关系:一方面,IMU的微型化与低成本化使得更多3D打印设备能够集成姿态感知能力;另一方面,增材制造技术本身也在推动IMU相关硬件的开发与普及。
当六轴IMU遇上3D打印:增材制造中的感知革命
将六轴IMU应用于3D打印领域,并非天方夜谭,而是正在发生的技术融合。当前的研究与实践主要沿着两条路径展开:一是将IMU用于3D打印设备的运动控制与状态监测,二是将3D打印作为制造IMU相关硬件的手段。
德国达姆施塔特工业大学最新发布的HELENE开源机械臂项目,生动展示了这两者的结合。HELENE是一款六自由度桌面机械臂,其全部结构件均通过商用3D打印机制造,而每个关节都集成了绝对值编码器,实现了闭环位置控制。虽然该项目使用的是编码器而非MEMS IMU,但其设计理念揭示了重要趋势:通过增材制造降低高性能机器人硬件的门槛,为姿态传感器提供了理想的搭载平台。
更具直接相关性的是,学者们已成功开发出基于Arduino控制的六轴3D打印机械臂,并实现了通过Android App进行蓝牙控制的功能。这类研究的意义在于:当六轴IMU的精度与成本达到临界点,完全可以替代现有的编码器方案,为3D打印机器人提供更紧凑、更经济的姿态感知方案。
在开源硬件社区,类似的探索已初现端倪。有开发者利用PICO VR控制器(内置IMU)的六自由度数据,通过逆运动学算法实时控制3D打印的六轴机械臂。这套系统在Unity引擎中实现了数字孪生——用户手持VR控制器挥动手臂,虚拟模型与实体机械臂同步跟随运动。这一案例清晰地展示了IMU作为“动作传感器”与3D打印作为“快速成型工具”的协同潜力:前者提供意图感知,后者实现物理具身。

展望未来,六轴IMU在3D打印领域的应用有望向两个方向深化。其一,打印过程的闭环控制:在打印机喷头上集成IMU,实时监测打印过程中的振动与偏移,通过反馈补偿提升大尺寸或复杂结构件的成型精度。其二,智能打印终端的姿态感知:对于需要现场部署的移动打印机器人,IMU可提供本体姿态与定位信息,使打印作业摆脱固定平台的空间限制。
市场格局:国产替代的窗口期
全球高端IMU市场正经历结构性变化。据IDTechEx预测,高端IMU市场将从2025年的38亿美元增长至2036年的65亿美元,主要由国防工业与自动驾驶两大板块驱动。另一研究机构Yole Intelligence则预测,全球IMU整体市场规模到2027年将接近28亿美元。
从技术路线看,MEMS IMU正在逐步蚕食光纤陀螺与激光陀螺的传统领地。尽管后两者在纯精度指标上仍保持优势,但MEMS技术在微型化、功耗、成本及抗过载能力方面的综合优势,使其成为高可靠性与无人系统的更优选择。与此同时,新一代MEMS陀螺仪正通过微半球谐振等创新几何结构,向战术级甚至导航级精度迈进。
这一市场长期由Honeywell、Northrop Grumman、Bosch等国际巨头主导,国产化率在中高端领域仍低于10%。但窗口期正在打开。以芯动联科为代表的国内企业,已在高性能MEMS惯性传感器领域形成技术闭环,其核心产品指标可对标国际主流厂商。目前,这些企业正将研发重心瞄准车用六轴IMU芯片及机器人市场,前者已进入车厂定点合作阶段,后者虽处于产业化早期,但技术储备已经就位。
技术演进:精度、集成与融合
展望未来,六轴IMU的技术发展将沿着三条主线展开。
精度提升是最基础的驱动力。通过优化MEMS结构设计、引入新材料的谐振式加速度计、以及更精细的温漂补偿模型,IMU的零偏稳定性正持续逼近光纤陀螺水平。芯动联科已实现谐振式FM加速度计的量产,其零偏稳定性相比传统电容式方案得到量级提升。
微型化与集成化则决定了IMU的应用边界。从分立元件到单片三轴设计,再到将ASIC与MEMS晶圆级集成,IMU的封装尺寸不断缩小。目前业界正在研发单片三轴陀螺仪,预计2026年可实现量产,届时六轴IMU芯片的体积与成本将进一步优化。
多传感器融合是提升系统鲁棒性的关键。在机器人应用中,单一的六轴IMU已难以满足复杂环境下的姿态控制需求,与视觉里程计、激光雷达SLAM、关节编码器的深度融合正在成为标准架构。这种融合不是简单的信号叠加,而是在卡尔曼滤波框架下,根据各传感器实时置信度动态分配权重的智能协同。
结语
从导弹制导到手机防抖,从自动驾驶到人形机器人,六轴陀螺仪已经走出了传统的高精尖“象牙塔”,成为智能时代的基础感知元件。它的演进历程印证了一个规律:当一项核心技术跨过性能与成本的临界点,就会在新兴应用领域引爆连锁创新。在3D打印领域,六轴IMU与增材制造的双向赋能才刚刚开始——前者为后者注入感知智能,后者为前者提供敏捷迭代的能力。可以预见,随着MEMS技术与先进算法的持续突破,这颗“感知之眼”将变得更精准、更小巧、更经济,在更多意想不到的角落,成为机器理解物理世界的窗口。
评论